Des CNNs aux Transformers Visuels : une décennie de bouleversements en vision par ordinateur
En 2025 , les Transformers visuels sont devenus la nouvelle référence en vision par ordinateur. Tout le monde en parle, mais c’est intéressant de revenir un peu en arrière pour comprendre comment on en est arrivé là.
L’ère des CNN
Pendant les années 2010 , la vision par ordinateur a connu un bond gigantesque. Quand AlexNet a remporté le concours ImageNet en 2011 , cela a lancé l’ère du deep learning appliqué à l’image. À partir de là, les CNN ont tout dominé. La recherche a progressé pas à pas avec des modèles comme VGG , ResNet , puis YOLO , qui ont rendu la détection d’objets accessible à presque tout le monde.
Je pense encore que YOLO a été une petite révolution : un système de détection presque plug-and-play, open source, facile à adapter, performant sans nécessiter une machine hors de prix. On pouvait entraîner un modèle sur son propre jeu de données et obtenir des résultats corrects en quelques jours. C’est ce qui a rendu la vision artificielle si accessible aux chercheurs indépendants et aux bidouilleurs.
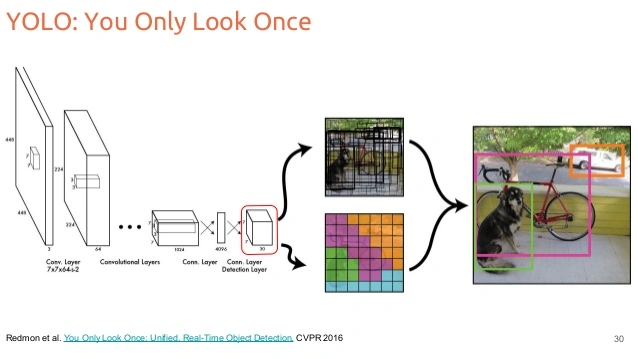 Fonctionnement schématique de YOLO
Fonctionnement schématique de YOLO Mais il y avait toujours un goulot d’étranglement : les données .
Les performances d’un modèle dépendent directement de la qualité et de la représentativité du jeu de données d’entraînement . Par exemple, si vous entraînez YOLO à détecter des chats et des chiens, mais que votre dataset contient 1 chien pour 9 chats , le modèle apprendra probablement que « tout animal à quatre pattes est un chat ». Résultat : 90 % de précision, mais un modèle totalement biaisé.
Cet exemple est trivial, mais les choses deviennent vite compliquées quand les classes sont plus subtiles. Imaginons que vous entraîniez un modèle à reconnaître “proie” et “prédateur” . Si vous collectez vos données en Europe, vous verrez des renards, des lapins, des cerfs… Mais votre classe “proie” représentera en réalité des proies européennes . Le modèle plantera dès qu’il verra un kangourou ou un jaguar. Pour être vraiment performant, il faudrait collecter des données partout dans le monde , et surtout les annoter à la main .
Et c’est là que le bât blesse : l’annotation. Dessiner des boîtes, écrire des labels, corriger les erreurs… c’est un travail humain énorme. Une seule annotation mal placée, et les performances globales peuvent s’en ressentir. C’est la rançon de l’apprentissage supervisé.
L’arrivée des Transformers
Puis est arrivé 2017 , avec le papier Attention Is All You Need . Les Transformers , à la base, étaient des modèles de traitement du texte , et ils ont tout changé, non pas en ajoutant de la complexité, mais en supprimant la convolution.
Au lieu d’extraire des caractéristiques localement, le Transformer utilise le self-attention pour apprendre quelles parties de l’entrée sont importantes. Moins d’hypothèses faites à la main, plus de flexibilité, et une architecture qui s’adapte mieux à la quantité de données.
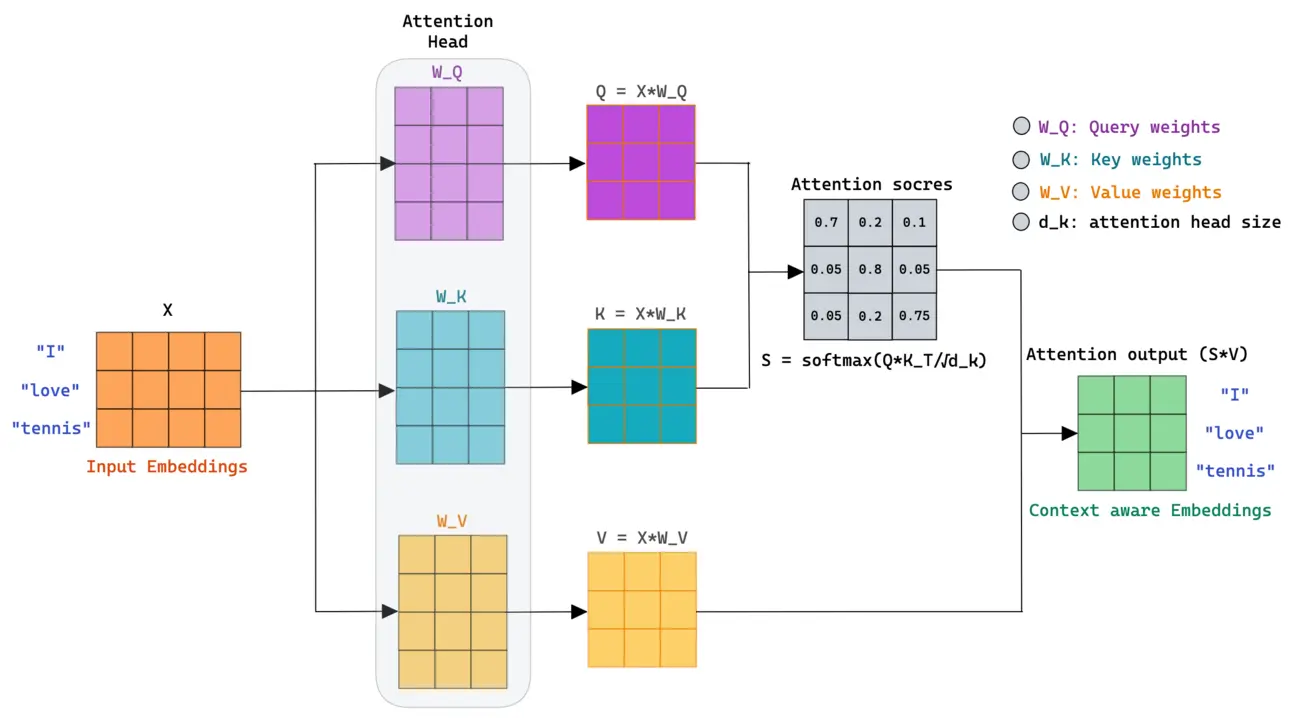 Schéma du fonctionnement du bloc d'attention. Source: Mlspring
Schéma du fonctionnement du bloc d'attention. Source: Mlspring Au début, on les utilisait pour des tâches de langage : traduction, résumé, génération de texte. Mais très vite, l’idée a contaminé le monde de la vision.
En 2019 , certains ont commencé à insérer des blocs d’attention dans des architectures de type ResNet. Et en 2020 , le Vision Transformer (ViT) a vu le jour. Il découpait les images en patches , les traitait comme des mots, et utilisait le même mécanisme d’attention que dans le texte. Résultat : des performances de pointe , à condition d’avoir suffisamment de données et de puissance de calcul.
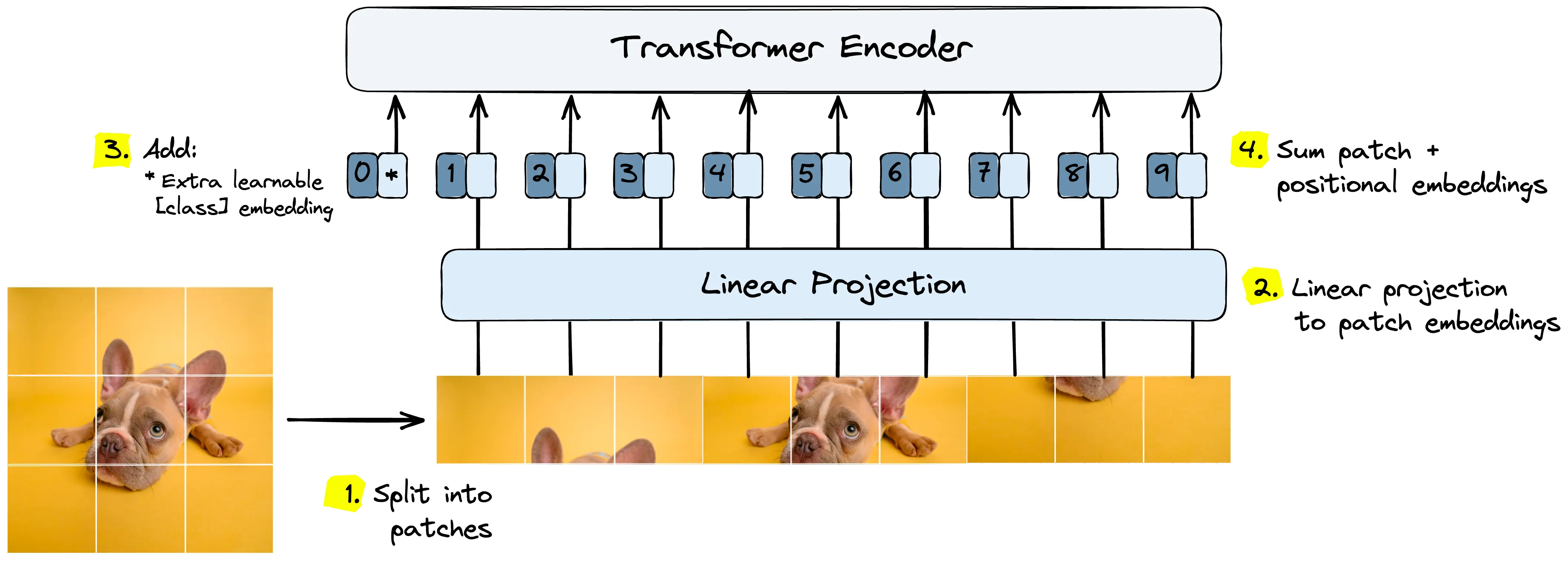 ViT découpe les images en patch tout en gardant l'information de la localité du patch
ViT découpe les images en patch tout en gardant l'information de la localité du patch C’est là que tout a basculé : on ne définissait plus à la main ce qui importait, le modèle pouvait l’apprendre tout seul, à condition d’avoir le budget GPU qui va avec.
La multimodalité et Grounding DINO
Avançons jusqu’à aujourd’hui : place à Grounding DINO et à la multimodalité .
La multimodalité , c’est le fait de combiner des données de natures différentes, par exemple image + texte, radar + vision, audio + texte, pour enrichir la compréhension du modèle. Quand j’écrivais mon mémoire de master en 2021 , le sujet était déjà brûlant. On m’avait demandé de créer un dataset vision–radar pour entraîner un Transformer vision–radar capable de suivre des véhicules en 3D. C’était sympa, mais le vrai vainqueur a été la combinaison texte–image .
Et ça, c’est facile à comprendre.
Montrez une photo d’un voilier à un modèle purement visuel : il dira juste “bateau”. Mais combinez-le avec un modèle de texte entraîné sur des milliards de documents, et il saura qu’une voile est généralement blanche, placée au-dessus de la coque , et que l’ensemble forme un bateau utilisé sur l’eau . Cette passerelle sémantique entre mots et pixels, c’est ce qui rend les modèles multimodaux si puissants : ils apprennent des concepts , pas seulement des formes.
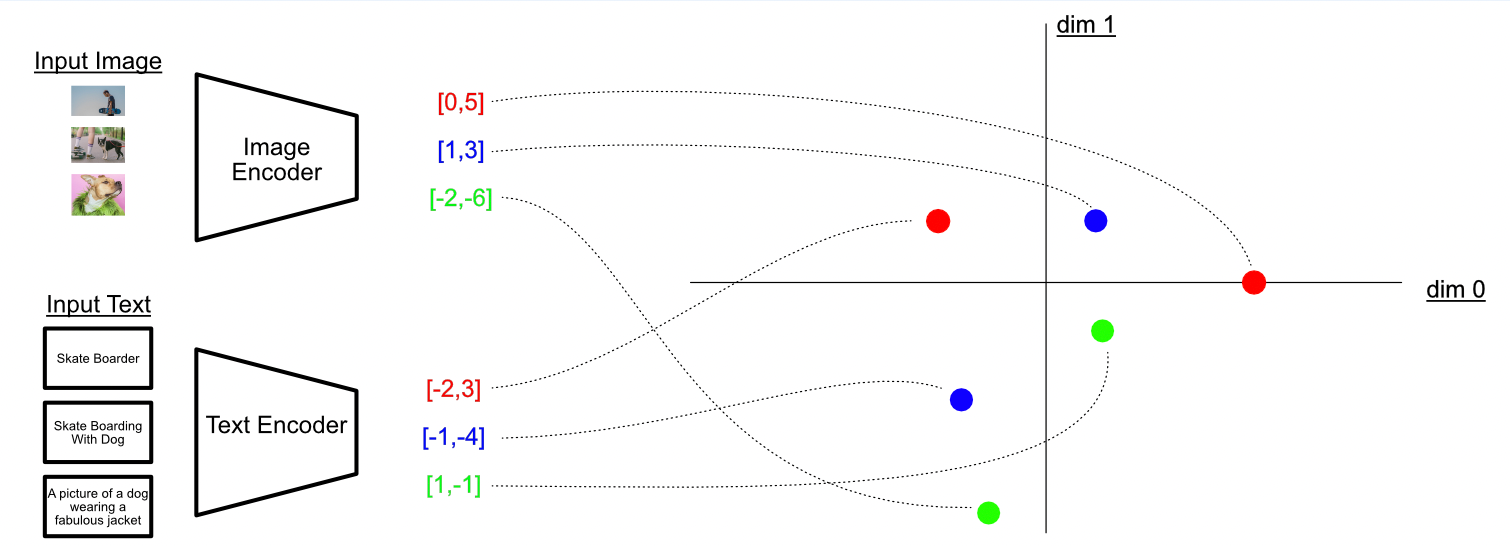 Le modèle CLIP représente dans le même espace latent les concepts extrait des images et du texte !
Le modèle CLIP représente dans le même espace latent les concepts extrait des images et du texte ! Pourquoi c’est vraiment important
L’impact concret, c’est qu’on n’a plus besoin d’annoter manuellement des milliers d’images pour chaque nouvelle classe.Tant que le concept existe déjà dans le modèle de texte (et qu’il n’est pas trop exotique), le modèle peut le reconnaître sans réentraînement , c’est ce qu’on appelle le zero-shot learning .
Autrement dit, on n’est plus limité aux classes définies pendant l’entraînement. On peut littéralement changer la consigne à la volée , simplement en modifiant la phrase de détection.
J’ai fait un petit test : j’ai fait tourner Grounding DINO sur une vidéo de drone FPV et j’ai changé la classe à détecter en plein vol . Le modèle est passé sans accroc de “peinture” à “personnes”, puis à “casque vr”, en temps réel.
 Démonstration de modification en direct des classes a détecter sur une vidéo FPV
Démonstration de modification en direct des classes a détecter sur une vidéo FPV Ce genre de flexibilité était impensable il y a encore quelques années.
Où on en est aujourd’hui
Actuellement, Grounding DINO est l’un des meilleurs modèles open source de détection vision–langage.
Il existe des variantes plus récentes comme GroundingDINO 1.5 ou GroundingDINO-X , mais elles sont fermées , donc peu exploitables pour expérimenter librement.
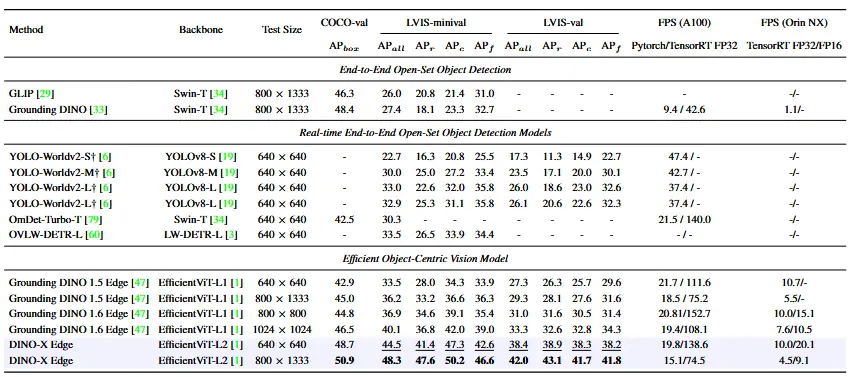 Comparatif de performances entre différents modèles open-source et fermés
Comparatif de performances entre différents modèles open-source et fermés Si les années 2010 étaient consacrées à détecter les objets , les années 2020 cherchent à comprendre ce qu’ils sont , et pour la première fois, les modèles commencent vraiment à comprendre le contexte de ce qu’ils voient.
 Des pixels aux concepts humain
Des pixels aux concepts humain